Rigs
1. Rig List

Displays the list of rigs. Each rig is represented as a tab.
Each rig features (from left to right):
- A status indicator. Blue if the rig is not sending any data, green if the configuration is valid and the communication has started or red if the communication failed due to invalid configuration
- Its name
- A rename button. Clicking on it will open a pop-up window with an input field to edit the rig’s name.
- A delete button. Clicking on it will remove the rig. On the right of the rig list are two buttons used to create new rigs.
The first (“+”) one adds a single empty rig to list. The second one (“++”) adds a rig for every tracking device connected and automatically adds the corresponding tracking node to it.
2. Rig
A rig defines an object to track, the data to send and how it should be sent.
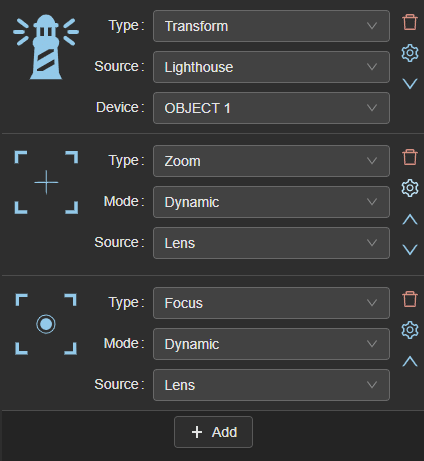
A rig is composed of a list of transforms. These will be resolved sequentially to determine the data packet to send to the render engine.
Example: A Transform node will set the orientation and position according to the chosen device tracked pose. A Focus node would then set the focus field based on its configuration. A static Translation node added to the end of the list would then modify the position that was set before by doing a translation of a defined value, etc...
The rig’s network and synchronization configuration is located just below the node list.
2.1. Settings
2.1.1. Inversion Settings
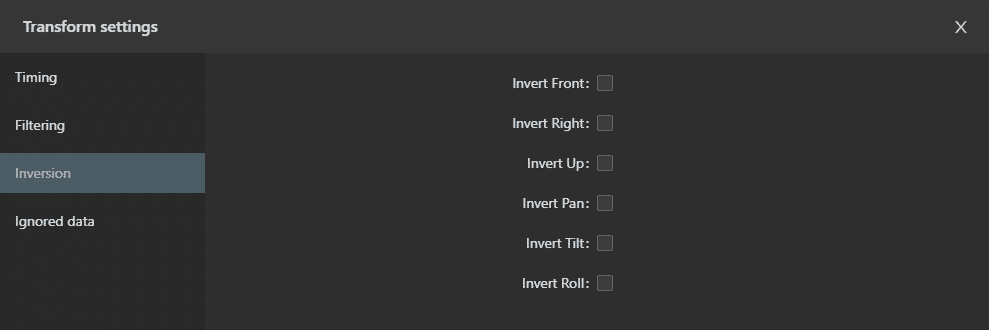
This window displays a checkbox for every value that can be inverted, depending on the node type.
For example, a "Zoom" node will have access to the "Invert zoom" parameter, while a "Pan" node will have access to its "Invert pan" counterpart. "Transform" nodes have access to every pose-related inversions. (X, Y, Z, Pan, Tilt and Roll)
2.1.2. Ignore Data Settings

This window displays a checkbox for every value that can be ignored, depending on the node type. It is typically used if you know a tracking source cannot move on one of the axes and you can safely ignore what it's sending.
For example, a "Zoom" node will have access to the "Ignore zoom" parameter, while a "Pan" node will have access to its "Ignore pan" counterpart. "Transform" nodes have access to every pose-related chekboxes. (X, Y, Z, Pan, Tilt and Roll)
2.2. Configuration
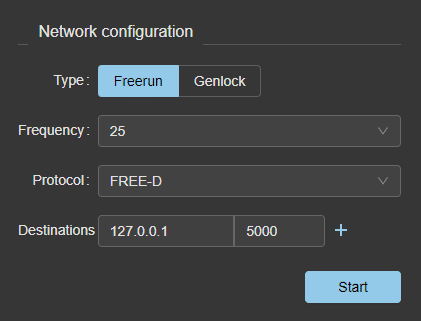
Provides a way of configuring how the tracking data will be synced and sent over the network.
2.2.1. Type
The type of sync to use for this rig, two types are available:
- Freerun : the data will be sent based on an internal timer. A complementary dropdown can be used to choose the desired frequency (ranging from 25 to 360Hz).

- Genlock : the data will be sent whenever EZtrack receives a genlock pulse input (This option is disabled if no genlock source is detected). The Genlock configuration is located in the Hardware Settings window.
2.2.2. Protocol

The data can either be sent as Free-D or TCD packets. You can choose which one here.
When using the TCD protocol, you'll need to choose a profile too. Profiles allow you to choose the advanced data to send, they can be configured in Settings → TCD.
2.2.3. Destination

Two fields define the IP address and port to which the tracking data will be sent. Another destination can be added by clicking on the "+" button, in which case another row will be added.
Clicking on the “Start” button will start sending the data to the configured endpoint(s).
2.3. Nodes
There are 10 node types, each having different configuration requirements.
-
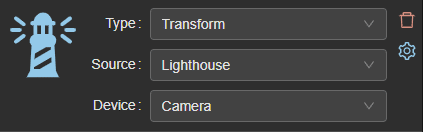
Transform : A transform node corresponds to a position and a rotation in the 3d space. It can either be set manually ("Static" source) or come from a connected tracker (other "source" options).
Example: To use the data coming from an Antilatency tracker, choose "Antilatency" as the source and the tracker in "Device" -
Zoom -> Focus : Set the rig’s zoom or focus value. Can be either “Static” or “Dynamic”. “Static” will set a value as the current rig’s zoom or focus, whereas “Dynamic” will update it based on the data sent by the lens connected to the system, a defined encodacam channel’s input or a Free-D receiver
-
Front/Right/Up translation : Translates the tracked device by a static or dynamic value on one of the 3 directions. Can be either "Static" or "Dynamic". "Static" will require a value in meters, whereas "Dynamic" will receive it's value from an Encoder channel or a Free-D receiver.
-
Pan/Tilt/Roll rotation : Rotates the tracked device by a static or dynamic value on one of the three axes. Can be either "Static" or "Dynamic". "Static" will require a value in meters, whereas "Dynamic" will receive it's value from an Encoder channel or a Free-D receiver.
-
Input : The node corresponds to the key of a ligthouse tracking device. Choose the tracker you want to read button presses from, and a list of keys will be available under the "Key" dropdown.
Due to the limitations of the Free-D protocol, the key's status will be sent either in place of the rig's zoom or focus field. You can choose wich one will get overriden using the "As" dropdown.
Example
“device” is “TRACKER1”; “key” is “Power”; “as” is “Focus”. When the “Power” button located on “TRACKER1” is pressed, the rig’s focus is set to 1; otherwise, it is set to 0.
2.3.1. Settings
There are 4 categories of settings that can be changed from this window, you can switch to each of these by clicking on the menu displayed on the left :
- "Filtering", which can be used to filter the data coming from this node. Useful if you experience jitter.
- "Timing", which can be used to add a delay to the specific node.
- "Inversion", which can be used to invert the sign of certain node values.
- "Ignore Data", which can be used to ignore part of the node's information, such as a position or rotation on an axis.